1. Introduction
La console de programmation est un élément essentiel dans l’utilisation des robots industriels. Elle permet aux opérateurs et aux programmeurs d’interagir avec le robot, de définir ses mouvements, d’écrire des programmes et d’effectuer des tests avant la mise en production. Chaque fabricant de robots propose une console spécifique, adaptée à son environnement logiciel et matériel.
2. Rôle et Fonctionnalités
La console de programmation, aussi appelée boîtier de commande, joue plusieurs rôles clés dans la manipulation d’un robot industriel :
- Déplacement manuel du robot (Jogging) : Permet de déplacer chaque axe du robot pour l’amener à une position souhaitée.
- Programmation et édition de trajectoires : L’opérateur peut écrire, modifier et tester des séquences de mouvements.
- Exécution et débogage de programmes : Possibilité de tester les programmes en mode pas-à-pas avant une exécution complète.
- Surveillance et diagnostics : Affichage des erreurs, état des capteurs et autres paramètres critiques.
- Sécurité : Intégration d’un bouton d’arrêt d’urgence et de fonctions de contrôle de sécurité pour éviter tout accident.
3. Différents Types de Consoles
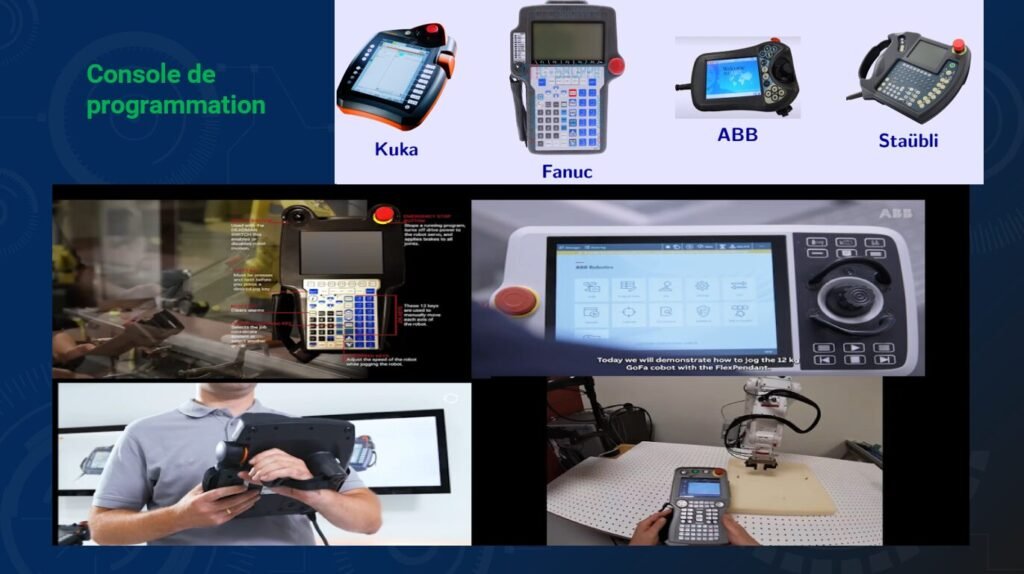
Chaque marque de robot industriel propose sa propre console de programmation, adaptée à ses spécificités. Voici quelques exemples :
- ABB – FlexPendant : Interface tactile avec joystick et boutons pour le contrôle précis. Programmation en RAPID.
- Fanuc – Teach Pendant : Console avec écran LCD et touches physiques pour la programmation en TP (Teach Pendant Language).
- Kuka – KRC SmartPAD : Écran tactile avec une interface intuitive, programmation en KRL (Kuka Robot Language).
- Staübli – SP1 : Console compacte et ergonomique utilisée avec le langage VAL3.
4. Interface et Navigation
La plupart des consoles modernes utilisent une combinaison d’écran tactile et de boutons physiques pour naviguer dans les menus et contrôler le robot. Les principales sections d’une console incluent :
- Zone de saisie et d’affichage du programme : Permet d’écrire et d’éditer les scripts de contrôle du robot.
- Commandes de navigation et de validation : Flèches directionnelles, boutons de validation et de retour.
- Boutons de sécurité : Arrêt d’urgence, boutons de validation pour activer les mouvements.
- Modes de fonctionnement : Permet de passer du mode manuel au mode automatique.
5. Programmation avec la Console
La programmation d’un robot à l’aide de la console passe généralement par deux méthodes principales :
-
Mode Apprentissage (Teaching)
- L’opérateur guide manuellement le robot à des positions précises.
- Ces positions sont enregistrées sous forme de points dans le programme.
- Cette méthode est couramment utilisée pour les tâches répétitives comme le soudage ou le pick-and-place.
-
Programmation en Langage Robotique
- Écriture de programmes directement sur la console en utilisant un langage spécifique (ex : RAPID pour ABB, KRL pour Kuka, TP pour Fanuc).
- Permet d’incorporer des conditions logiques, des boucles et des interactions avec d’autres équipements industriels.
6. Importance de la Sécurité
L’utilisation d’une console de programmation nécessite des mesures de sécurité strictes :
- Vérification de l’environnement de travail avant de déplacer le robot.
- Utilisation des boutons de validation pour éviter les mouvements involontaires.
- Formation des opérateurs pour limiter les erreurs de manipulation.
Conclusion
La console de programmation est l’outil principal pour l’interaction avec un robot industriel. Son rôle est crucial pour l’apprentissage des trajectoires, la programmation et la maintenance. Grâce aux avancées technologiques, ces consoles deviennent de plus en plus intuitives, facilitant ainsi leur utilisation par les techniciens et ingénieurs.